
shenlan_vio_course:02IMU标定
参考网址
cggos/shenlan_vio_course: 深蓝学院《视觉SLAM进阶:从零开始手写VIO》第一期 (github.com)
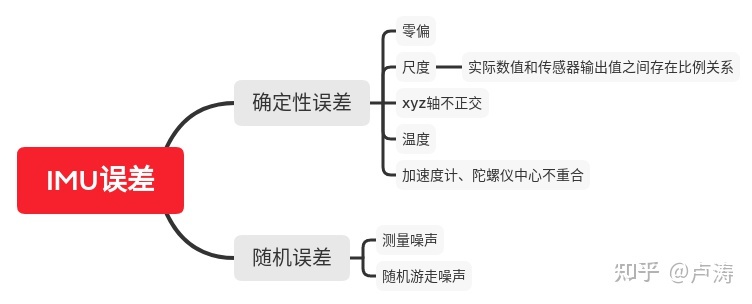
误差来源
标定方法
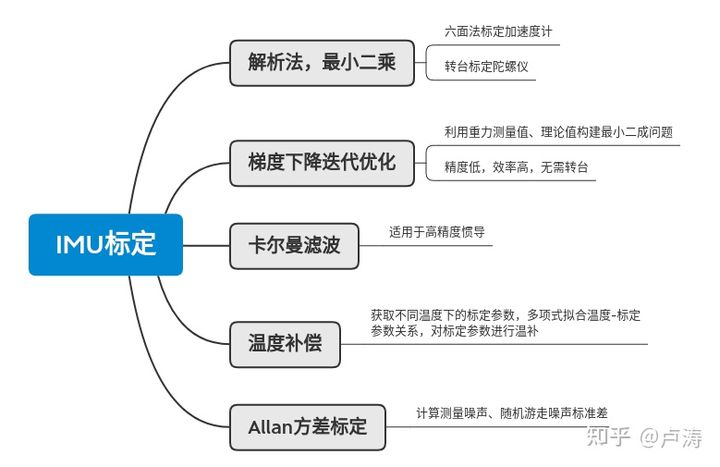
Allan方差标定
原理: 多传感器融合定位理论基础(三):惯性器件误差分析 - 知乎 (zhihu.com)
梯度下降迭代优化标定
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 某飞行员的随笔!
cggos/shenlan_vio_course: 深蓝学院《视觉SLAM进阶:从零开始手写VIO》第一期 (github.com)
原理: 多传感器融合定位理论基础(三):惯性器件误差分析 - 知乎 (zhihu.com)