
前轮反馈控制(stanley)
参考网址
路径规划与轨迹跟踪系列算法学习_第11讲_Stanley法_哔哩哔哩_bilibili
AtsushiSakai/PythonRobotics: Python sample codes for robotics algorithms. (github.com)
[(116条消息) Stanley轨迹跟踪算法Python/Matlab算法实现_gophae的博客-CSDN博客_stanley算法](https://blog.csdn.net/gophae/article/details/102765091?ops_request_misc=&request_id=&biz_id=102&utm_term=stanley算法 c实现&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-3-102765091.142^v2^article_score_rank,143^v4^control&spm=1018.2226.3001.4187)
算法简介
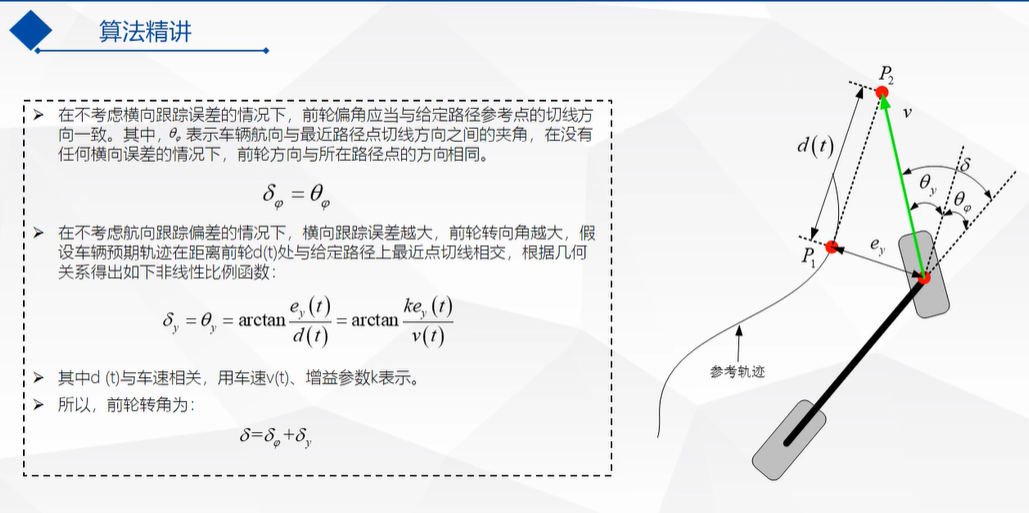
通过前轮反馈控制,采用航向偏差与横向偏差(err = err_phi + err_y)
代码实现
获得最近点index
1 | function [error, ind] = calc_target_index(x,y,yaw, cx,cy,L) |
stanley
1 | function [delta] = stanley_control(x,y,yaw,v,cx,cy,cyaw, ind,ck,L, error) |
纵向控制
1 | function [a] = PIDcontrol(target_v, current_v, Kp) |
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 某飞行员的随笔!