参考网址:
AtsushiSakai/PythonRobotics: Python sample codes for robotics algorithms. (github.com)
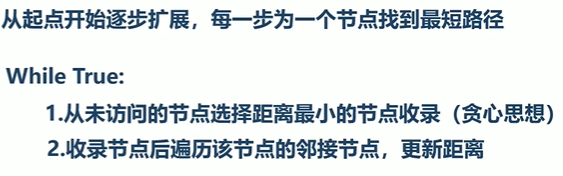
基于dijkstra算法,实现路径规划
机器人路径规划、轨迹优化系列课程_哔哩哔哩_bilibili
AStarSearch
算法基本思想
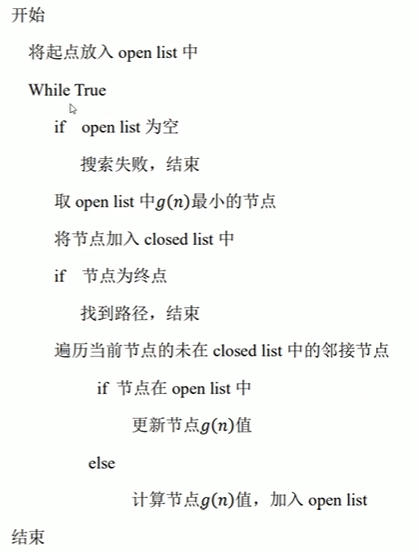
代码流程
使用优先级队列实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
|
fill(dist, dist + nV + 1, INF);
priority_queue<P, vector<P>, greater<P> > q;
dist[s] = 0;
q.push(P(0, s));
while (!q.empty())
{
P p = q.top();
q.pop();
int v = p.second;
if (dist[v] < p.first)
continue;
if (v == end)
break;
for (int unsigned i = 0; i < G[v].size(); i++){
Edge &e = G[v][i];
int dis = dist[v] + e.cost;
if (dist[e.to] > dis){
dist[e.to] = dist[v] + e.cost;
q.push(P(dist[e.to], e.to));
G4[v].push_back(e);
}
else if (dist[e.to] == dis){
G4[v].push_back(e);
}
}
}
|
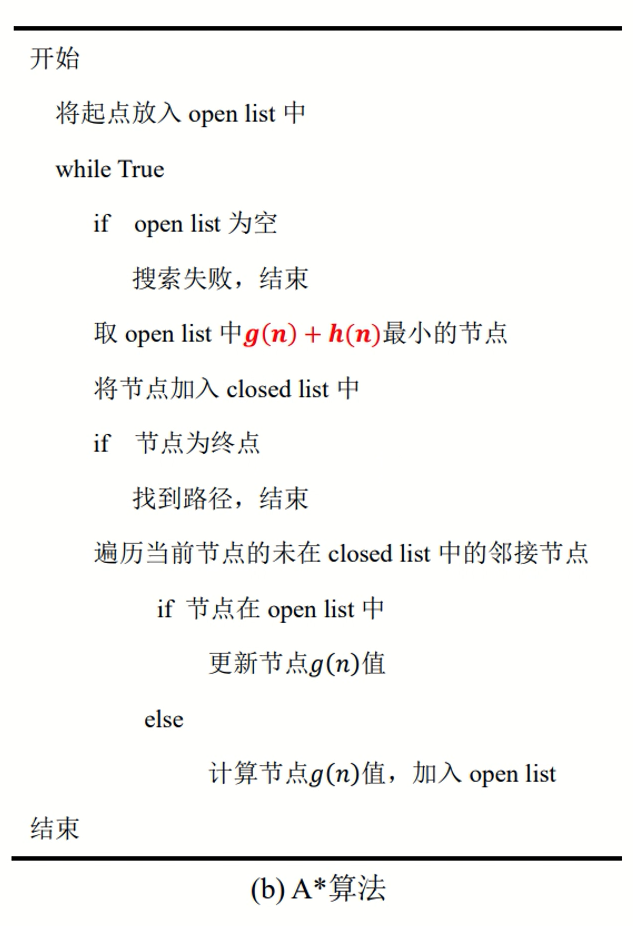
Astar算法
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
| APoint* CAstar::findWay(APoint *beginPoint, APoint *endPoint,vector< vector<APoint*> >& allPoints)
{
_allPoints = allPoints;
_endPoint = endPoint;
if (_endPoint->type == AType::ATYPE_BARRIER)
{
cout<<"终点是障碍"<<endl;
return nullptr;
}
if (*_endPoint == *beginPoint)
{
cout<<"起始点相同"<<endl;
return nullptr;
}
_openList.push_back(beginPoint);
beginPoint->type = AType::ATYPE_OPENED;
beginPoint->f = getF(beginPoint);
do
{
_curPoint = _openList[0];
_openList.erase(_openList.begin());
_curPoint->type = AType::ATYPE_CLOSED;
_closeList.push_back(_curPoint);
if (*_curPoint == *_endPoint)
{
cout<<"have find way"<<endl;
return _curPoint;
}
vector<APoint*> neVec = getNeighboringPoint(_curPoint);
for (int i = 0; i<neVec.size(); i++)
{
auto tmpoint = neVec[i];
if (tmpoint->type == AType::ATYPE_CLOSED)
{
continue;
}
if (tmpoint->type != AType::ATYPE_OPENED)
{
tmpoint->parent = _curPoint;
tmpoint->g = _curPoint->g + 10;
tmpoint->h = getH(tmpoint);
_openList.push_back(tmpoint);
tmpoint->type = AType::ATYPE_OPENED;
}
else
{
if (tmpoint->h < _curPoint->h)
{
tmpoint->parent = _curPoint;
tmpoint->g = _curPoint->g + 10;
}
}
}
sort(_openList.begin(), _openList.end(), mySort);
} while (_openList.size()>0);
cout<<"---can not find way---"<<endl;
return nullptr;
}
|
