参考网址: (114条消息) DWA动态窗口法的原理及应用_gophae的博客-CSDN博客_动态窗口法
ROS 2D导航原理系列教程合集(WHEELTEC)_哔哩哔哩_bilibili
ShisatoYano/dynamic_window_approach (github.com)
(114条消息) SLAM学习:DWA算法原理和Python编程实现_YuriFan的博客-CSDN博客_dwa算法实现
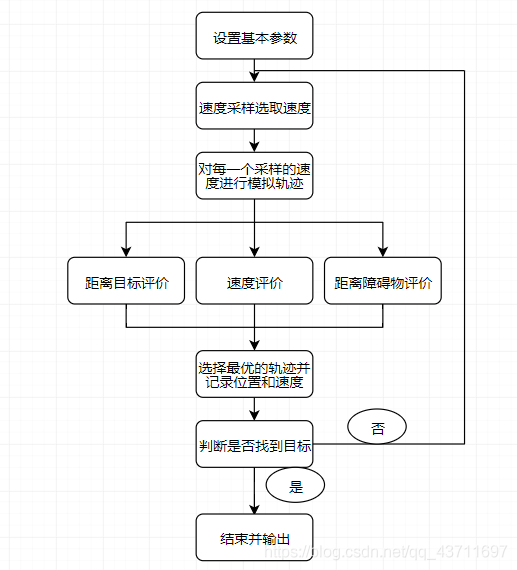
流程
代码流程 1 2 3 4 5 6 7 8 9 10 11 for 1:1000 % 迭代1000次 dwa_control(); motion(); if 接近目标点: break dwa_control(): calc_dynamic_window(); -> calc_final_input(); calc_final_input(): calc_trajectory()->to_goal_cost->speed_cost->obst_cost->u_traj(v,w)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 DynamicWindow calc_dynamic_window (State *st) DynamicWindow dw = {0.0 , 0.0 , 0.0 , 0.0 }; float vs[4 ] = {MIN_SPD_MS, MAX_SPD_MS, -MAX_YAWRATE_RS, MAX_YAWRATE_RS}; float vd[4 ] = {st->v_ms - MAX_ACCEL_MS2 * DT_S, st->v_ms + MAX_ACCEL_MS2 * DT_S, st->omega_rads - MAX_DYAWRATE_RS2 * DT_S, st->omega_rads + MAX_DYAWRATE_RS2 * DT_S}; dw.min_v = max(vs[0 ], vd[0 ]); dw.max_v = min(vs[1 ], vd[1 ]); dw.min_yr = max(vs[2 ], vd[2 ]); dw.max_yr = min(vs[3 ], vs[3 ]); return dw; }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 for (float v = dw->min_v; v < dw->max_v; v+=V_RESO) { for (float y = dw->min_yr; y < dw->max_yr; y+=YAWRATE_RESO) { traj = calc_trajectory(&st_init, v, y); to_goal_cost = GOAL_COST_GAIN * calc_to_goal_cost(&traj, goal); speed_cost = SPD_COST_GAIN * (MAX_SPD_MS - traj.back().v_ms); obst_cost = OBST_COST_GAIN*calc_obstacle_cost(&traj, obst, obst_num); final_cost = to_goal_cost + speed_cost + obst_cost; if (min_cost >= final_cost) { min_cost = final_cost; min_u.v_ms = v; min_u.omega_rads = y; best_traj = traj; } } }