
amcl原理分析
参考网址:
slam 学习之 AMCL 概念与原理分析_学之知之的博客-CSDN博客_amcl定位原理
机器人定位技术:AMCL的参数你真的会调了吗?(一) - 知乎 (zhihu.com)
改写amcl
ROS导航包源码学习2 — 定位 - 知乎 (zhihu.com)
概念算法
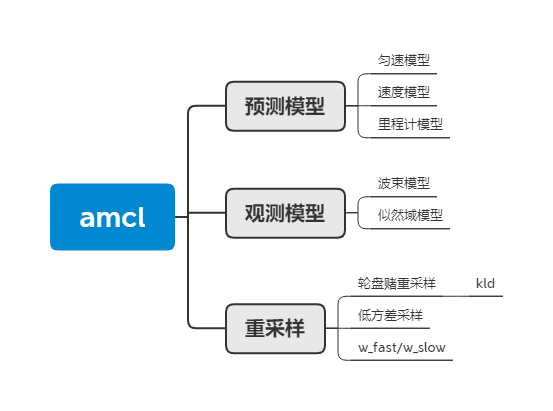
- 运动模型(里程计模型)
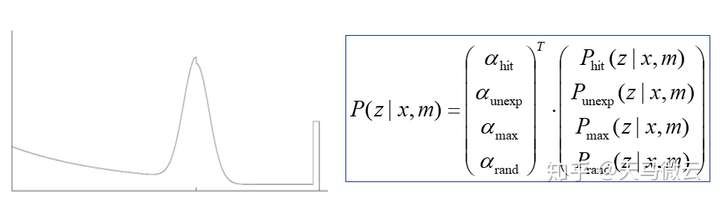
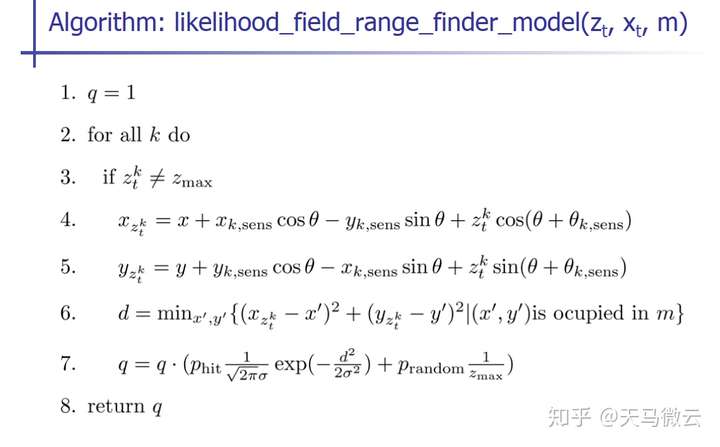
- 测量模型(波束模型与似然域模型)
- 采样算法(KLD采样)
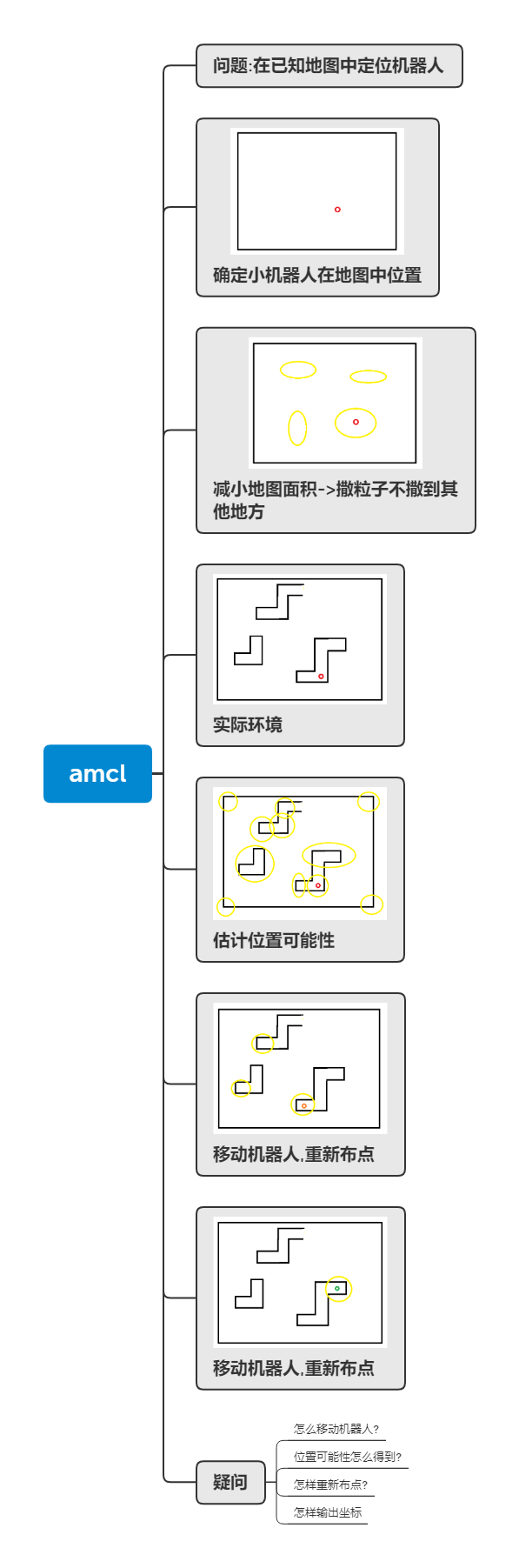
- 蒙特卡洛算法
- 自适应蒙特卡洛算法
运动模型
关于速度模型与里程计模型 ,主要采取采样模型
这里主要使用里程计模型
测量模型
波束模型主要调整六个参数: ,
,
,
,
(
的方差)和λ(动态障碍物的影响力度)
似然域模型主要调整两个参数
。
KLD采样
目的:将估计的概率分布转化为真实的概率分布。

amcl理解与拓展
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 某飞行员的随笔!