参考网址:
思岚A1激光雷达hector_mapping建图与定位_欧俊岑的博客-CSDN博客
tx2+r2000激光雷达 hector建图_大家安静啊的博客-CSDN博客
hectorslam之EAI雷达(ydlidar_x2l)配置过程_sunshine-CSDN博客
NickL77/RPLidar_Hector_SLAM: Hector SLAM without odometry data on ROS with the RPLidar A1 (github.com)
简介
hector是纯粹基于laserscan数据的算法,只需要提供scan数据即可,这里使用r2000做实验.因此第一步应该发布scan数据.
Scan激光数据发布
r2000提供了ros发布的驱动文件,因此只需要修改些配置即可.
驱动网址:
dillenberger/pepperl_fuchs: Pepperl+Fuchs R2000 Driver (github.com)
修改一下配置:
1
2
3
4
5
6
7
8
9
10
11
12
| <?xml version="1.0"?>
<launch>
<node pkg="pepperl_fuchs_r2000" type="r2000_node" name="r2000_driver_node" output="screen">
<param name="scanner_ip" value="192.168.1.19"/>
<param name="frame_id" value="laser_link"/>
<param name="scan_frequency" value="35"/>
<param name="samples_per_scan" value="3600"/>
</node>
</launch>
|
1
2
3
4
5
6
7
| scanner_ip r2000的配置激光ip地址
frame_id 发布出去的框架id(用于tf转换)
scan_frequency 扫描频率
samples_per_scan 每圈的扫描数
# 值得注意的是这里r2000发不出去的scan节点为/r2000_driver_node/scan
# 可以通过remap重定义为/scan
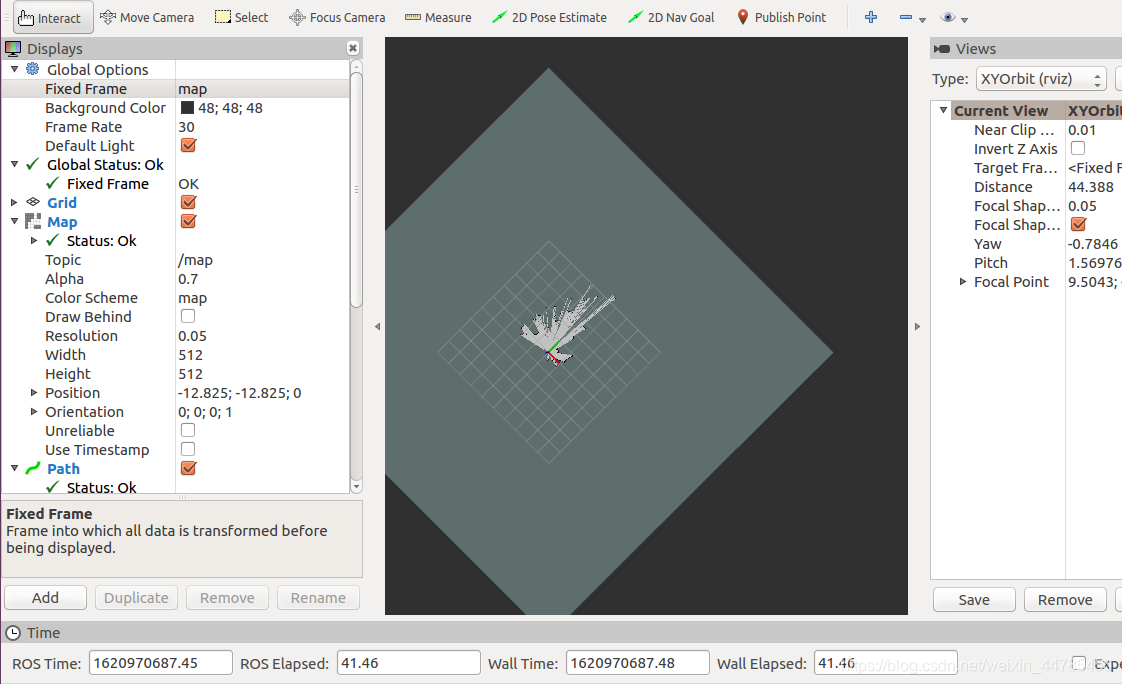
最后通过rviz显示
|
ros执行命令:
1
| roslaunch pepperl_fuchs_r2000 gui_example.launch
|
使用hector_mapping建图并定位
这里可以直接在系统中安装hector,并新建hector_mapping.launch文件,指令如下:
1
2
3
4
5
| sudo apt-get install ros-melodic-hector-slam
cd catkin_ws/src
catkin_create_pkg run_launch # 因为内部都是launch文件并不需要依赖包
cd run_launch && sudo mkdir launch && cd launch
sudo nano hector_mapping.launch
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
| <launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="512"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="/r2000_driver_node/scan"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0.105 0 0 0 /base_link /laser_link 100"/>_
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>
</launch>
|
执行步骤:
1
2
3
4
| # 发布scan数据
roslaunch pepperl_fuchs_r2000 gui_example.launch
# 启动hector_mapping
roslaunch run_launch hector_mapping.launch
|
一些图片
总结
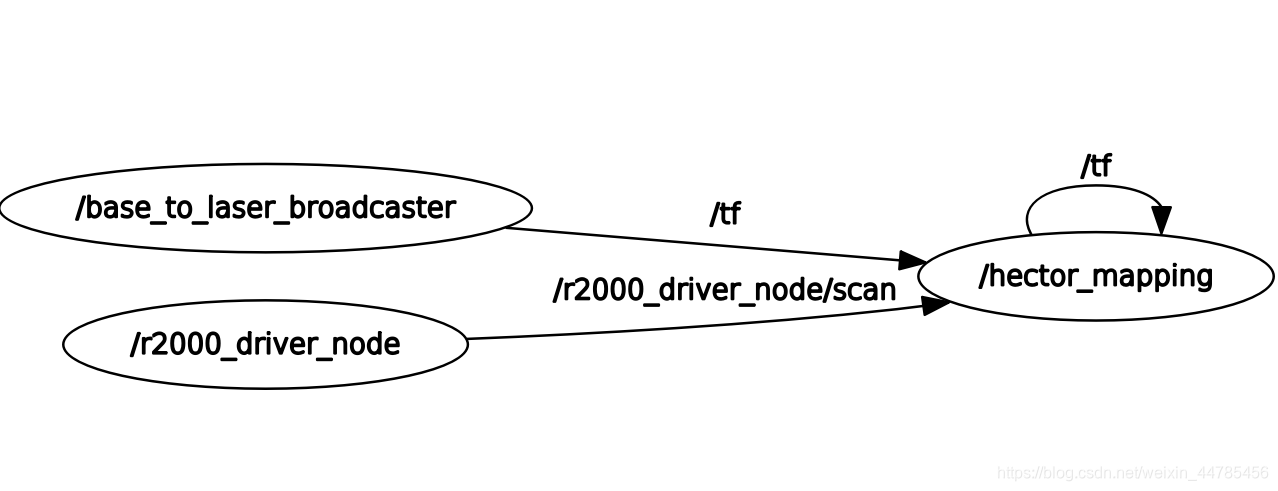
1.订阅/scan不要出错
2.tf转换尤为需要注意,map->base_link->laser_link
3.激光距离与地图大小需要注意一下,这里设不好容易崩
