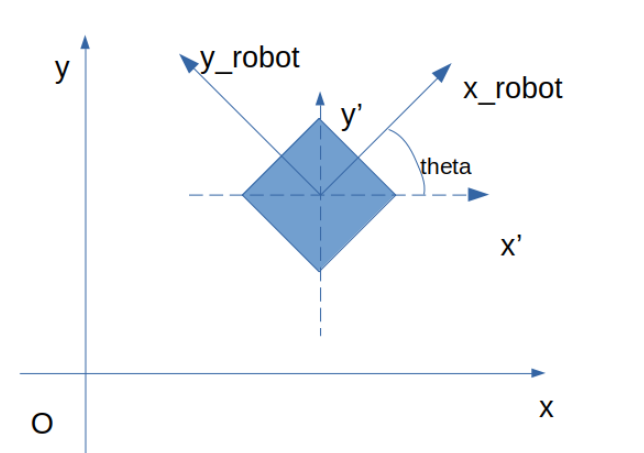
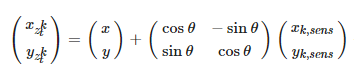
局部全局坐标转换模型 公式: ROS 中里程计的计算代码理解12345678double dt = (current_time - last_time).toSec();double delta_x = (vx * cos(th) - vy * sin(th)) * dt;double delta_y = (vx * sin(th) + vy * cos(th)) * dt;double delta_th = vth * dt;x += delta_x;y += delta_y;th += delta_th;