
概率机器人
参考网址:
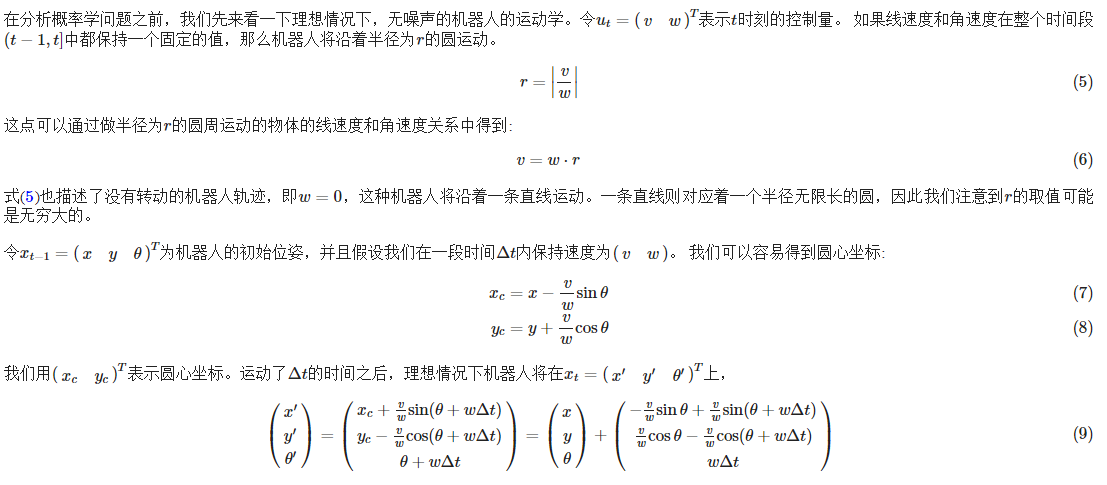
5.机器人运动模型
速度模型(概率运动规划)
闭式算法

采样算法
数学推导
精确运动
真实运动
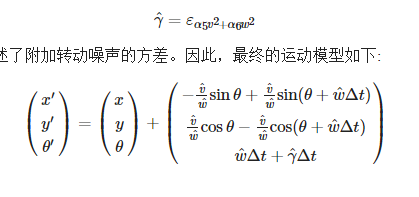
加入扰动,模型表达为
加入噪声,求得概率公式为:

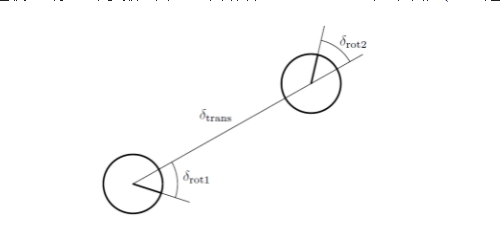
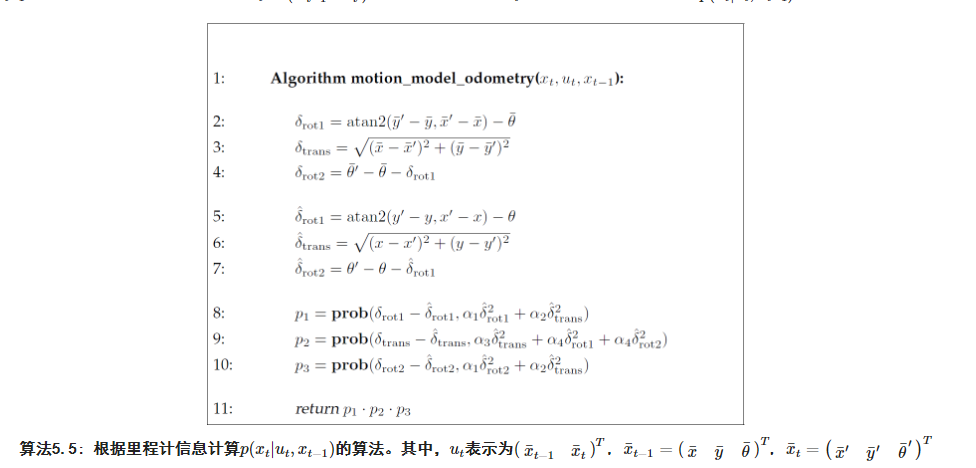
里程计模型(估计)
模型为:
闭式算法
采样算法

数学推导
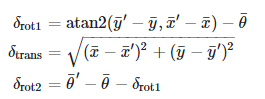
三次转换:
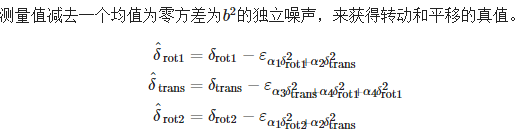
加入噪声:
求出坐标:
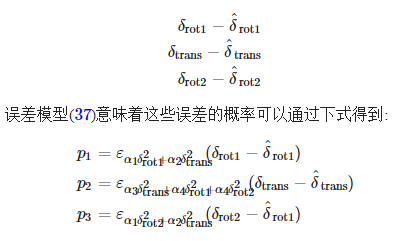
求得最终概率:
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 某飞行员的随笔!
加入扰动,模型表达为
加入噪声,求得概率公式为:
模型为:
三次转换:
加入噪声:
求出坐标:
求得最终概率: